
Les opérateurs de machines à mesurer tridimensionnelles (MMT) apprécient grandement la possibilité de déplacer les bras de la MMT et de mesurer les pièces à l’aide d’une seule application logicielle unifiée. On ne saurait trop insister sur la commodité et l’efficacité de cette intégration transparente. Cette solution logicielle tout-en-un rationalise le processus de mesure et d’inspection 3D, ce qui facilite considérablement la gestion pour l’opérateur.
Quels sont les défis à relever pour effectuer des travaux d’inspection avec un robot ?
La situation se complique lorsqu’il s’agit d’utiliser des robots pour l’inspection. Les métrologues sont confrontés à des défis considérables s’ils doivent programmer le robot à l’aide d’une application logicielle distincte de leur solution de métrologie. Cette approche à double logiciel nécessite soit d’apprendre à programmer le robot soi-même, soit de confier cette tâche à un programmeur de robots. La première option nécessite une formation et la seconde entraîne une perte d’autonomie sur le processus d’inspection. Dans les deux cas, la charge de travail augmente en raison de la nécessité de synchroniser les mouvements du robot avec l’équipement de mesure.
Comment l’utilisation de logiciels peut-elle contribuer à optimiser le travail d’inspection avec un robot ?
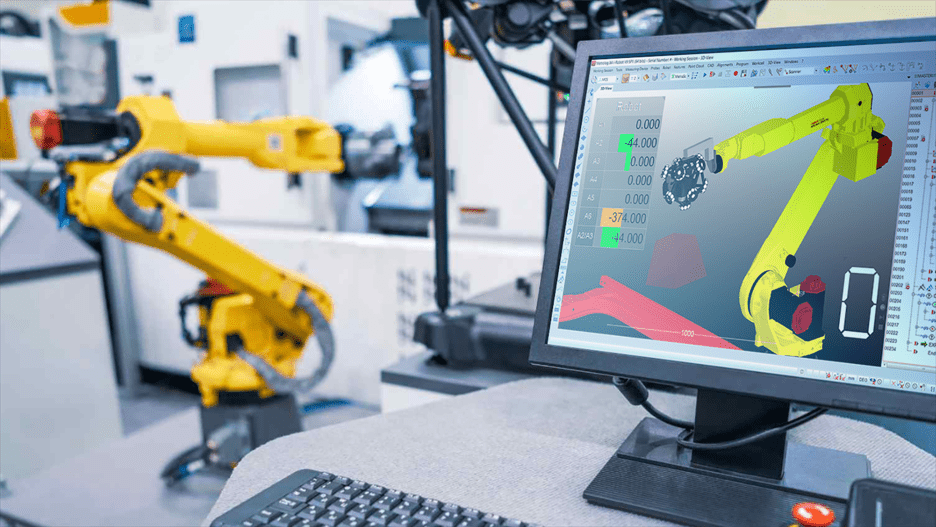
S’ils avaient le choix, les métrologues préféreraient sans aucun doute programmer le robot à l’aide de la même application logicielle que celle qu’ils utilisent pour leur métrologie, tout comme ils le font sur la MMT. Cette approche unifiée et tout-en-un permet à l’opérateur de donner des instructions au robot et des instructions de métrologie dans le même programme. Le logiciel convertit alors automatiquement ces instructions et communique directement avec le robot. Cette méthode révolutionne le flux de travail des métrologues en simplifiant le processus et en éliminant la complexité du matériel.
Néanmoins, il reste essentiel de s’assurer que les tâches peuvent être exécutées sans problème. Ces vérifications peuvent être effectuées hors ligne dans un environnement virtuel simulé ou directement dans une cellule physiquement connectée au robot et à l’équipement de mesure.
Quels sont les avantages de la programmation d’un robot comme une MMT ?
La possibilité de programmer un robot de la même manière qu’une MMT présente de nombreux avantages :
- Une solution flexible
- Des mesures plus rapides
- Vitesse de transmission des instructions au robot
- Fournir des instructions de mesure correctes, quelle que soit la marque du robot.
- Pas besoin d’être un expert en robotique
- Gain de temps
- Une manière efficace de faire les choses
En adoptant une application logicielle unique pour la programmation de l’inspection des robots, comme il en existe pour les MMT, les opérateurs peuvent s’affranchir de la lourde tâche de synchronisation des actions entre des systèmes distincts, ce qui se traduit par un processus de mesure et d’inspection 3D plus efficace et plus simple.